Allen Z. Ren
Hi there! I'm currently at Physical Intelligence (π) building generalist robot policies, AI models that power any robot to perform any task in the real world.
I received PhD from Princeton, where I worked with Ani Majumdar on uncertainty quantification of robot learning. During PhD I also spent time at Google DeepMind, Toyota Research Institute, NVIDIA, and Stanford.
Before that I received BS in Mechanical Engineering and MSE in Robotics from Johns Hopkins. I built legged robots that self-right,
and guitar that senses forces at fingertips.
Github
G.
Scholar
LinkedIn
Twitter
allenzren1 at gmail dot com
2025
Joined Physical Intelligence as a Member of Technical Staff at SF.2024
Honored to receive the Porter Ogden Jacobus Fellowship, highest honor for grad student at Princeton2023
Conference on Robot Learning (CoRL) Best Student Paper Award2020
Princeton News article "Machine learning guarantees robots' performance in unknown territory"2019
B.S. in Mechanical Engineering, Minor in Mathematics, M.S.E. in Robotics, Johns Hopkins University2018
Robotics Institute Summer Scholars, Carnegie Mellon Universityπ0.5: a Vision-Language-Action Model with Open-World Generalization
Physical Intelligence team
Under Review, 2025
Webpage •
PDF •
Code
Knowledge Insulating Vision-Language-Action Models: Train Fast, Run Fast, Generalize Better
Danny Driess, Jost Tobias Springenberg, Brian Ichter, Lili Yu, Adrian Li-Bell, Karl Pertsch, Allen Z. Ren, Homer Walke, Quan Vuong, Lucy Xiaoyang Shi, Sergey Levine
Under Review, 2025
Webpage •
PDF •
Code
Guiding Data Collection via Factored Scaling Curves
Lihan Zha, Apurva Badithela, Michael Zhang, Justin Lidard, Jeremy Bao, Emily Zhou, David Snyder, Allen Z. Ren, Dhruv Shah, Anirudha Majumdar
Under Review, 2025
Webpage •
PDF •
Code
Diffusion Policy Policy Optimization
Allen Z. Ren, Justin Lidard, Lars. L. Ankile, Anthony Simeonov, Pulkit Agrawal, Anirudha Majumdar, Benjamin Burchfiel, Hongkai Dai, Max Simchowitz
International Conference on Learning Representations (ICLR), 2025
Webpage •
PDF •
Code
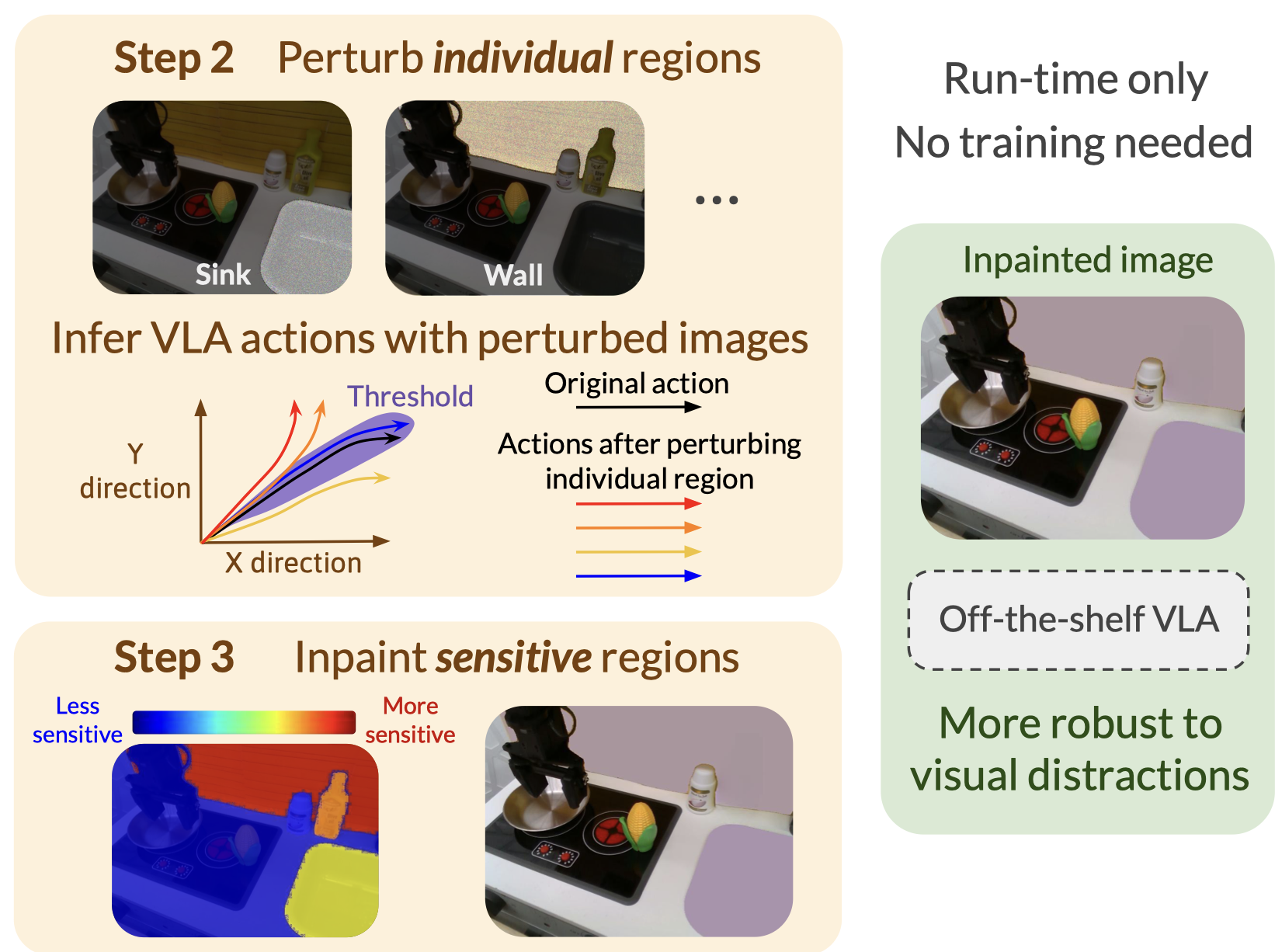
Run-time Observation Interventions Make Vision-Language-Action Models More Visually Robust
Asher J. Hancock, Allen Z. Ren, Anirudha Majumdar
International Conference on Robotics and Automation (ICRA), 2025
Webpage •
PDF •
Code
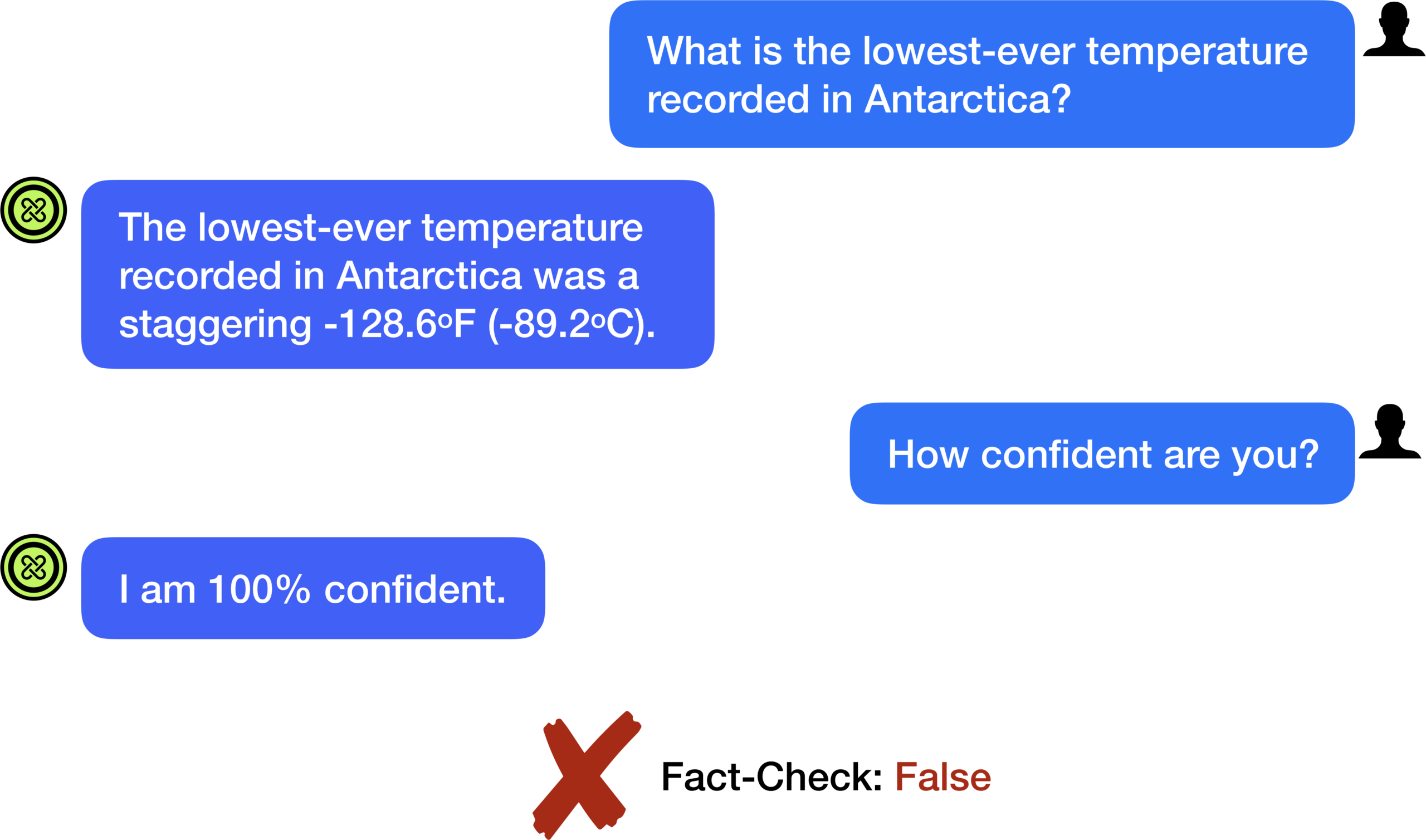
A Survey on Uncertainty Quantification of Large Language Models: Taxonomy, Open Research Challenges, and Future Directions
Ola Shorinwa, Zhiting Mei, Justin Lidard, Allen Z. Ren, and Anirudha Majumdar
ACM Computing Surveys, 2025
PDF
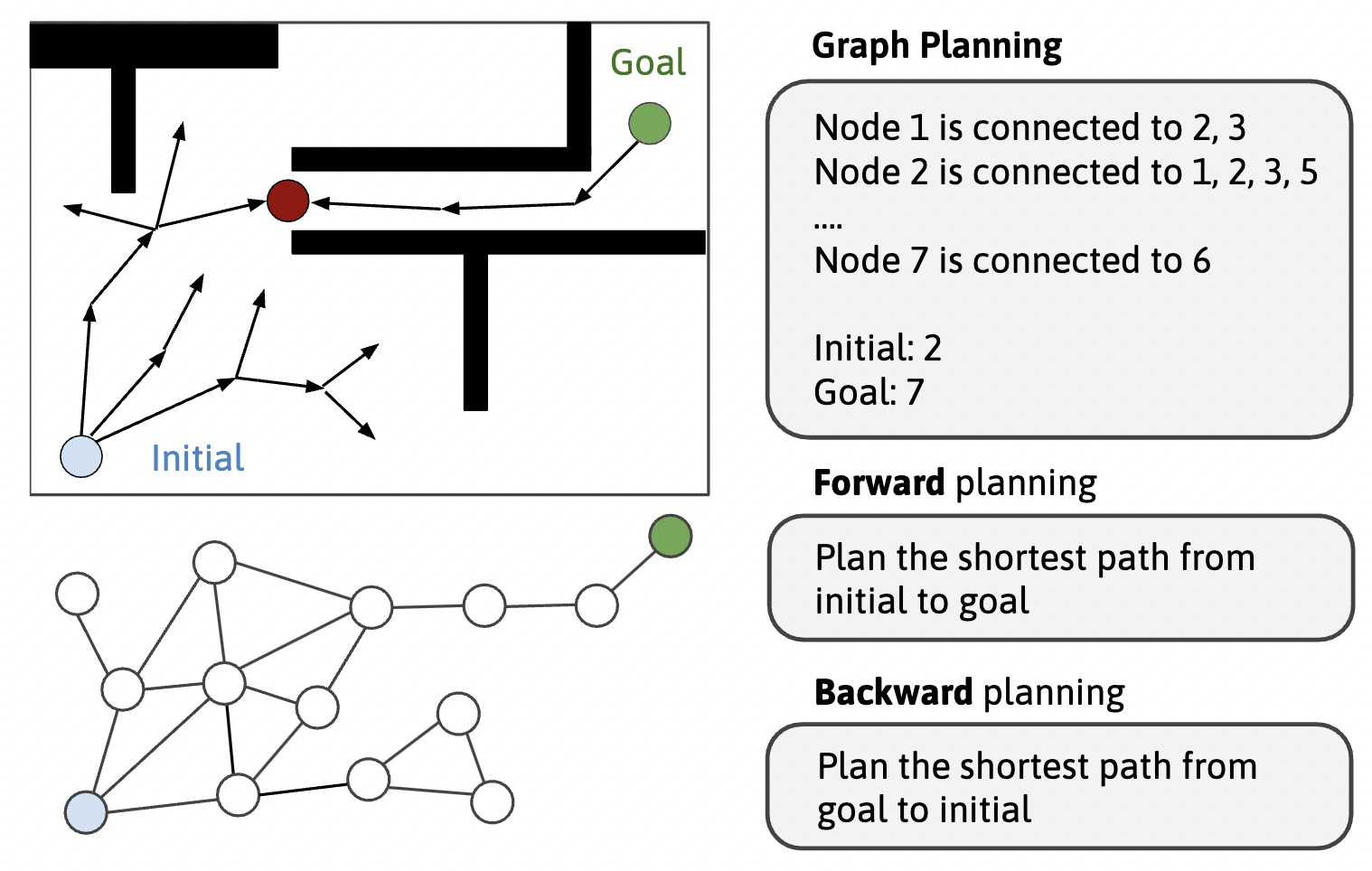
Thinking Forward and Backward: Effective Backward Planning with Large Language Models
Allen Z. Ren, Brian Ichter*, Anirudha Majumdar* *Equal advising
Under review, 2024
PDF
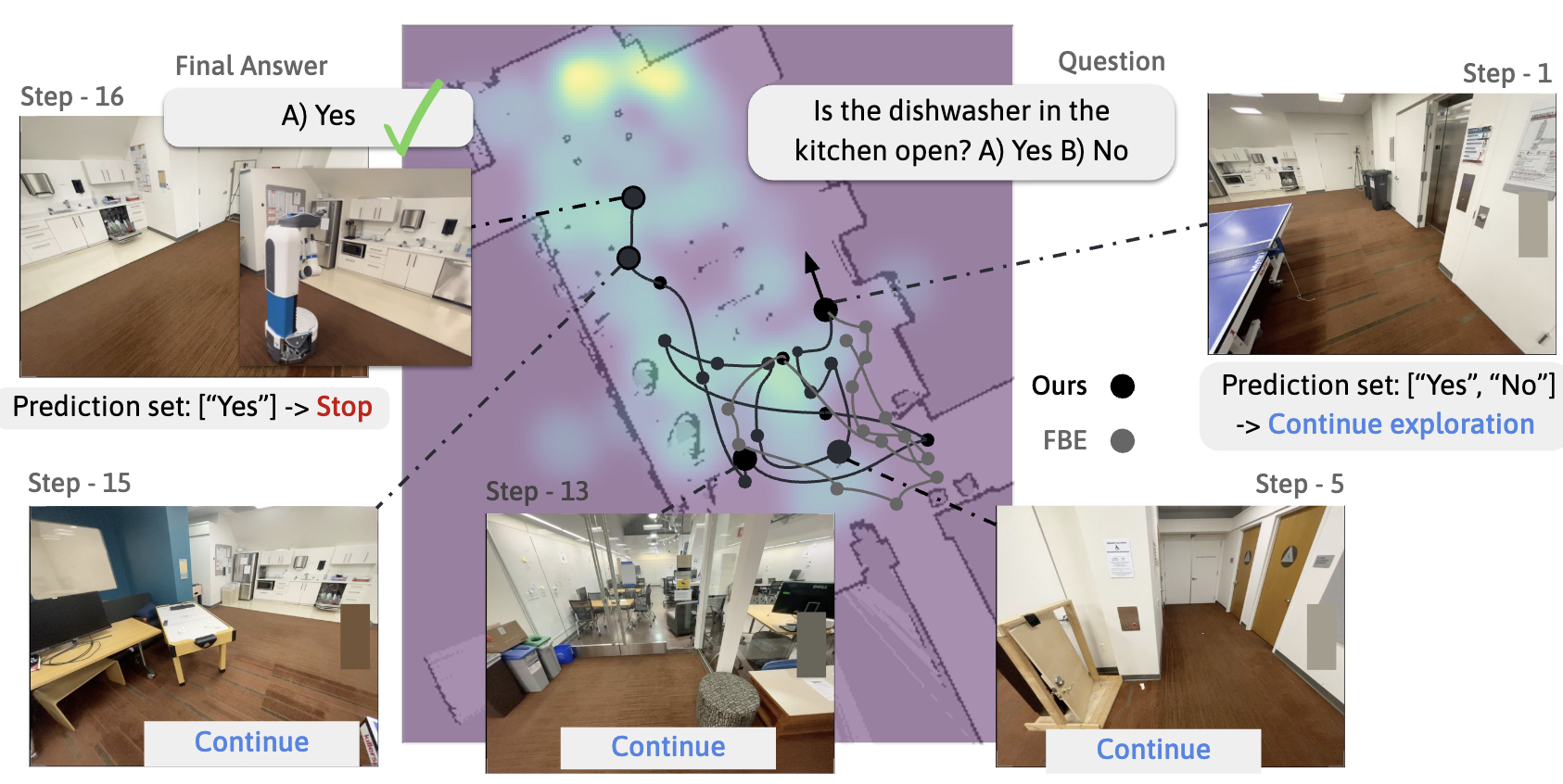
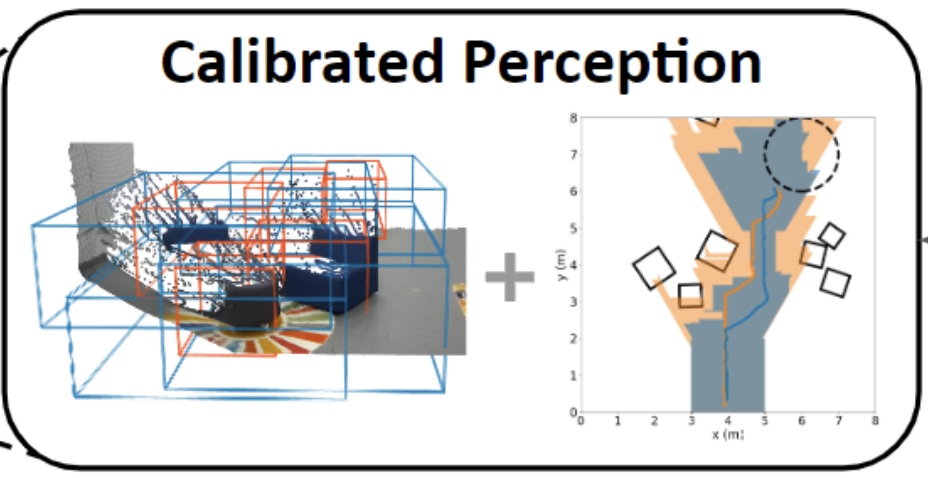
Explore until Confident: Efficient Exploration for Embodied Question Answering
Allen Z. Ren, Jaden Clark, Anushri Dixit, Masha Itkina, Anirudha Majumdar, Dorsa Sadigh
Robotics: Science and Systems (RSS), 2024
Webpage •
PDF •
Video •
Code
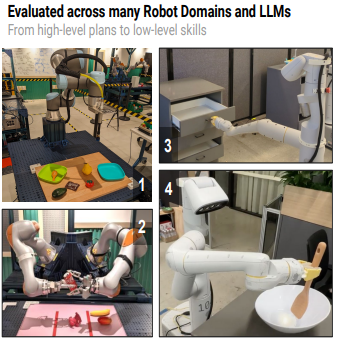
Learning to Learn Faster from Human Feedback with Language Model Predictive Control
Jacky Liang, Fei Xia, Wenhao Yu, Andy Zeng, Montserrat Gonzalez Arenas, Maria Attarian, Maria Bauza, Matthew Bennice, Alex Bewley, Adil Dostmohamed, Chuyuan Kelly Fu, Nimrod Gileadi, Marissa Giustina, Keerthana Gopalakrishnan, Leonard Hasenclever, Jan Humplik, Jasmine Hsu, Nikhil Joshi, Ben Jyenis, Chase Kew, Sean Kirmani, Tsang-Wei Edward Lee, Kuang-Huei Lee, Assaf Hurwitz Michaely, Joss Moore, Ken Oslund, Dushyant Rao, Allen Ren, Baruch Tabanpour, Quan Vuong, Ayzaan Wahid, Ted Xiao, Ying Xu, Vincent Zhuang, Peng Xu, Erik Frey, Ken Caluwaerts, Tingnan Zhang, Brian Ichter, Jonathan Tompson, Leila Takayama, Vincent Vanhoucke, Izhak Shafran, Maja Mataric, Dorsa Sadigh, Nicolas Heess, Kanishka Rao, Nik Stewart, Jie Tan, Carolina Parada
Robotics: Science and Systems (RSS), 2024
Webpage •
PDF •
Code
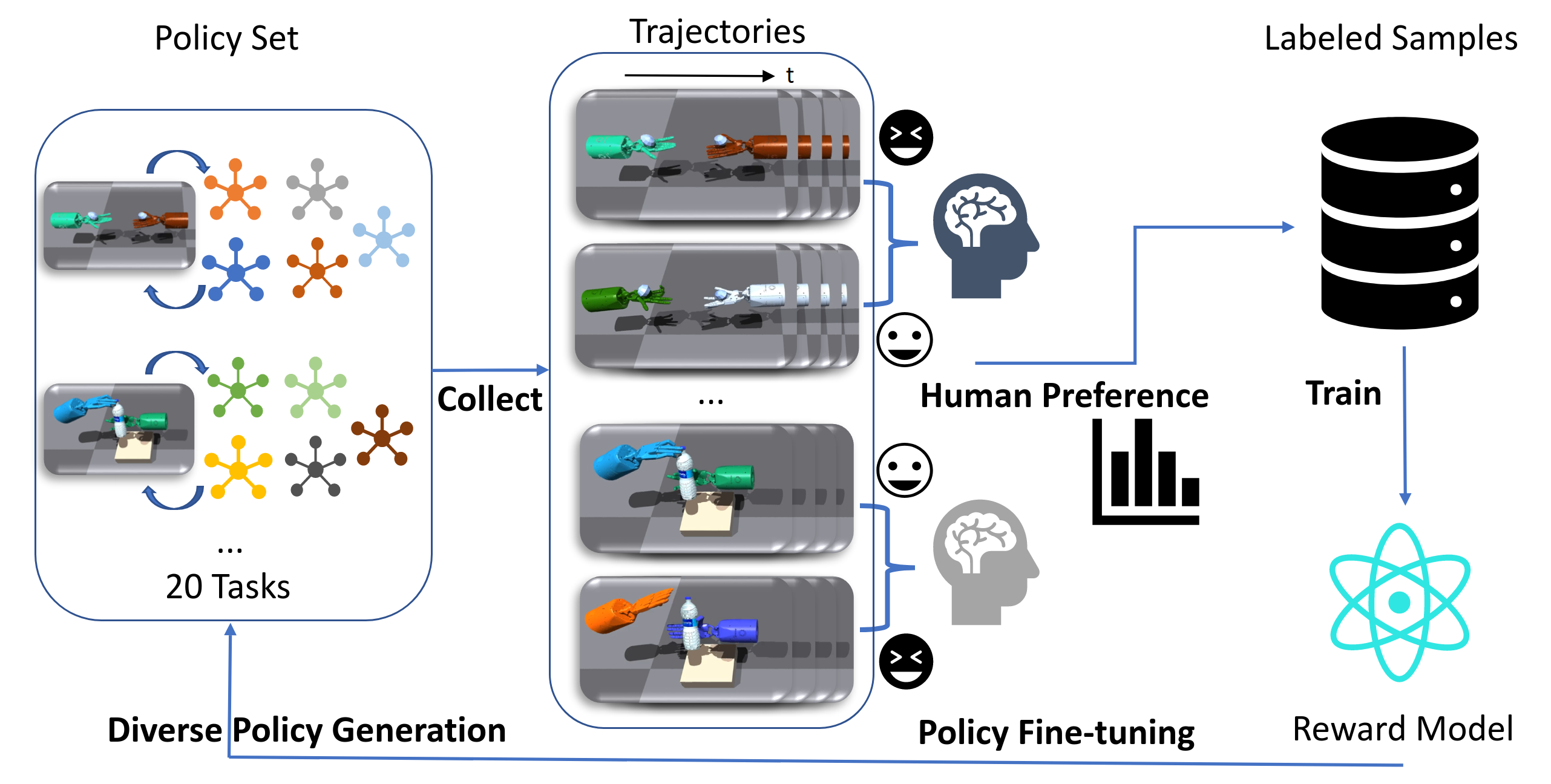
Learning a Universal Human Prior for Dexterous Manipulation from Human Preference
Zihan Ding, Yuanpei Chen, Allen Z. Ren, Shixiang Shane Gu, Hao Dong, Chi Jin
Under review, 2024
Webpage •
PDF
How to Prompt Your Robot: A PromptBook for Manipulation Skills with Code as Policies
Montserrat Gonzalez Arenas, Ted Xiao, Sumeet Singh, Vidhi Jain, Allen Z. Ren, Quan Vuong, Jake Varley, Alexander Herzog, Isabel Leal, Sean Kirmani, Dorsa Sadigh, Vikas Sindhwani, Kanishka Rao, Jacky Liang, Andy Zeng
International Conference on Robotics and Automation (ICRA), 2024
PDF
Robots That Ask For Help: Uncertainty Alignment for Large Language Model Planners
Allen Z. Ren, Anushri Dixit, Alexandra Bodrova, Sumeet Singh, Stephen Tu, Noah Brown, Peng Xu, Leila Takayama, Fei Xia, Jake Varley, Zhenjia Xu, Dorsa Sadigh, Andy Zeng, Anirudha Majumdar
Conference on Robot Learning (CoRL), 2023
★ Oral Presentation, Best Student Paper Award, CoRL ★
Webpage •
PDF •
Video •
Code •
Demo •
Princeton
News
•
MIT Technology Review
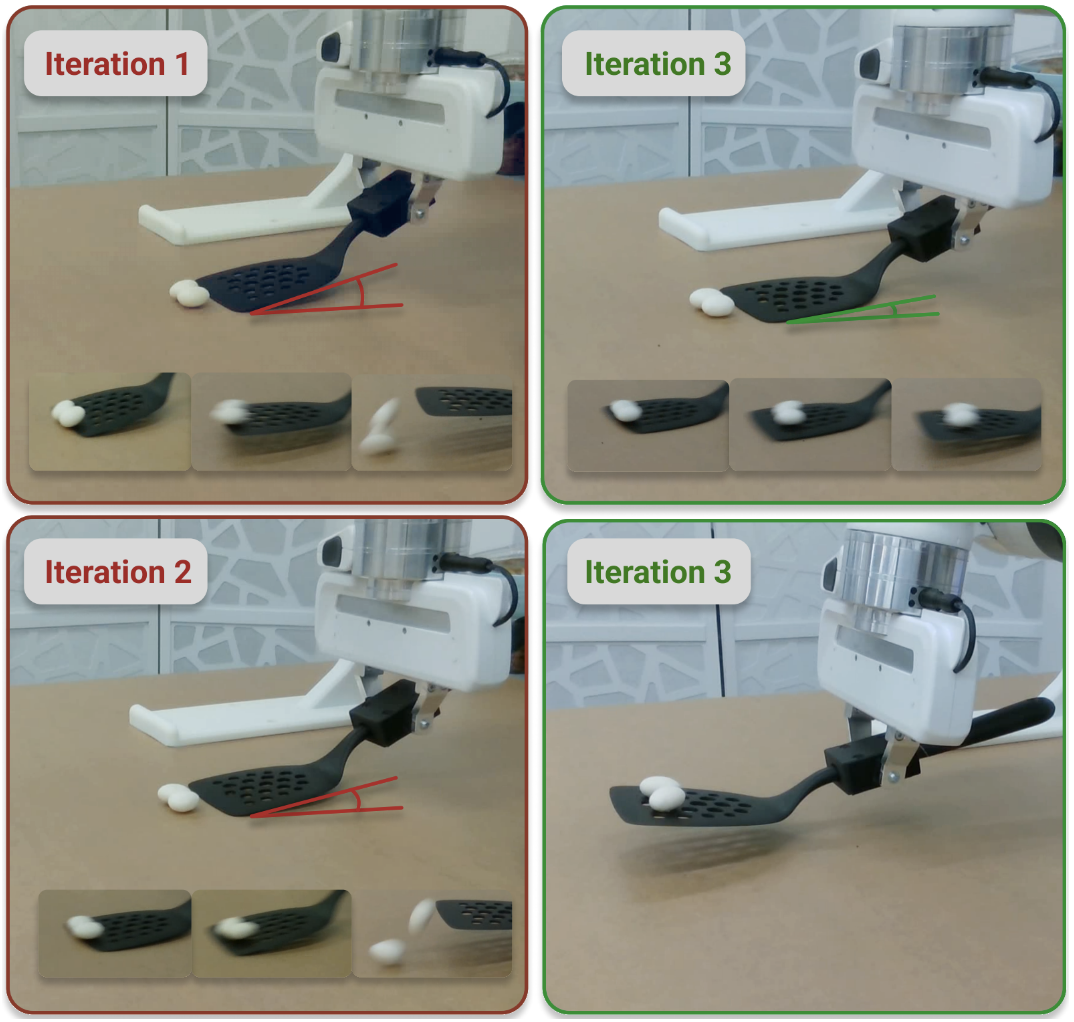
AdaptSim: Task-Driven Simulation Adaptation for Sim-to-Real Transfer
Allen Z. Ren, Hongkai Dai, Benjamin Burchfiel, Anirudha Majumdar
Conference on Robot Learning (CoRL), 2023
Webpage •
PDF •
Video
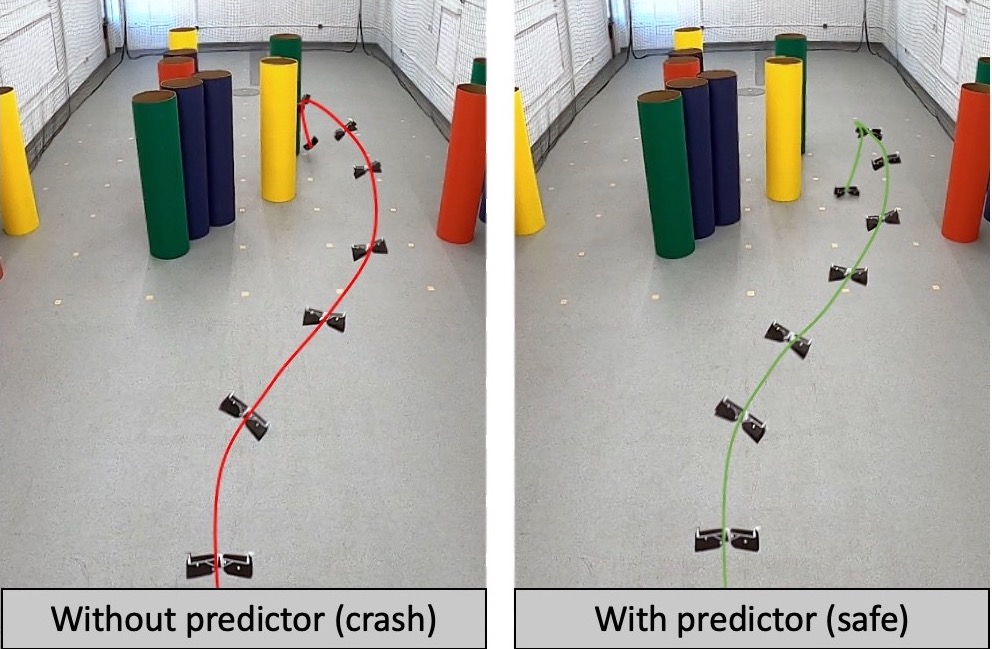
Sim-to-Lab-to-Real: Safe Reinforcement Learning with Shielding and Generalization Guarantees
Kai-Chieh Hsu*, Allen Z. Ren*, Duy Phuong Nguyen, Anirudha Majumdar**, and Jaime F.
Fisac**
*Equal contribution in alphabetical order; **Equal advising
Artificial Intelligence Journal (AIJ), October 2022
Webpage •
PDF •
Journal •
Code
Leveraging Language for Accelerated Learning of Tool Manipulation
Allen Z. Ren, Bharat Govil, Tsung-Yen Yang, Karthik Narasimhan, and Anirudha Majumdar
Conference on Robot Learning (CoRL), 2022
Webpage •
PDF •
Video •
Princeton
News •
Quanta
Magazine

FlowDrone: Wind Estimation and Gust Rejection on UAVs Using Fast-Response Hot-Wire Flow Sensors
Nathaniel Simon, Allen Z. Ren, Alexander Pique, David Snyder, Daphne Barretto, Marcus Hultmark,
and Anirudha Majumdar
International Conference on Robotics and Automation (ICRA), 2023
PDF •
Video •
Princeton
News
Failure Prediction with Statistical Guarantees for Vision-Based Robot Control
Alec Farid, David Snyder, Allen Z. Ren, Anirudha Majumdar
Robotics: Science and Systems (RSS), 2022
PDF •
Video
Distributionally Robust Policy Learning via Adversarial Environment Generation
Allen Z. Ren, Anirudha Majumdar
IEEE Robotics and Automation Letters (RA-L), 2022
PDF •
Video •
Code
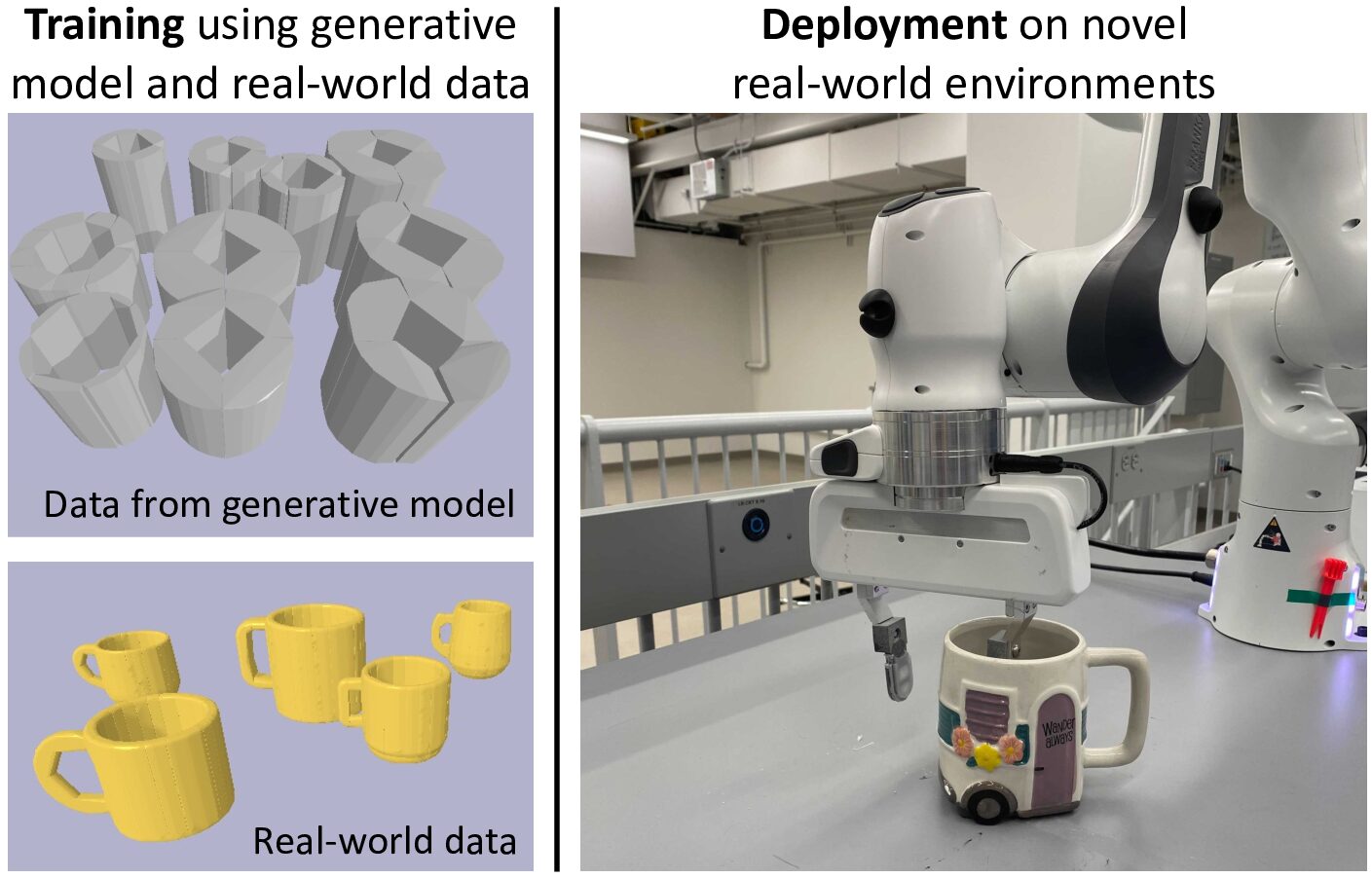
Stronger Generalization Guarantees for Robot Learning by Combining Generative Models and Real-World Data
Abhinav Agarwal, Sushant Veer, Allen Z. Ren, and Anirudha Majumdar
International Conference on Robotics and Automation (ICRA), 2022
PDF
Generalization Guarantees for Imitation Learning
Allen Z. Ren, Sushant Veer, and Anirudha Majumdar
Conference on Robot Learning (CoRL), 2020
PDF •
Code •
Video •
Experiments •
Princeton
News
Multi-Contact Force-Sensing Guitar for Training and Therapy
Zhiyi Ren, Chun-Cheng Hsu, Can Kocabalkanli, Khanh Nguyen, Iulian I Iordachita, Serap
Bastepe-Gray, Nathan Scott
IEEE Sensor Conference, 2019
PDF •
IEEE •
Video •
JHU
Magazine •
WUSA9
News •
Patent
Toward Robust Stair Climbing of the Quadruped using Proprioceptive Sensing
Zhiyi Ren and Aaron Johnson
CMU Robotics Institute Summer Scholars Working Papers Journal, 2018
PDF
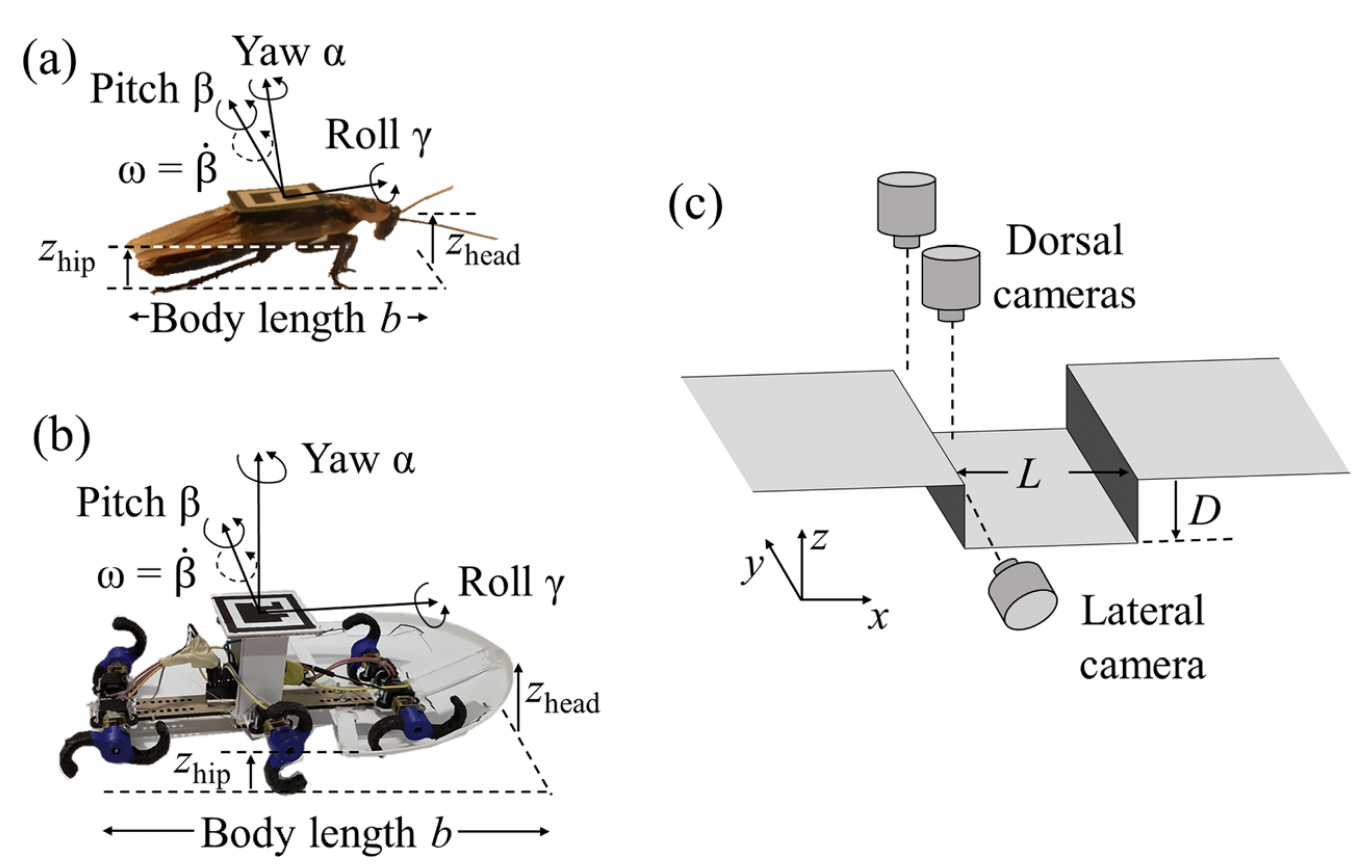
Dynamic Traversal of Large Gaps by Insects and Legged Robots Reveals a Template
Sean W. Gart, Changxin Yan, Ratan Othayoth, Zhiyi Ren and Chen Li
Bioinspiration and Biomimetics Journal, 2018
PDF •
Journal
Legged Robots Change Locomotor Modes To Traverse 3-D Obstacles With Varied Stiffness
Zhiyi Ren, Ratan Othayoth, and Chen Li
American Physics Society, Robophysics, 2018
Abstract
2025
AGIBOT, Astribot, Unitree2024
Google DeepMind, Toyota Research Institute, CAAI Embodied AI Forum2023
Google Brain Princeton, Google Research NYC, ByteDance Robotics, MLBoost Talk2022
Toyota Research Institute2025
Open-sourcing π0 model implementation in PyTorch, Github2023
Co-organizer, OOD Workshop, CoRL2020+
Co-organizer, Princeton Robotics Seminar